Loading...
Searching...
No Matches
px4_ros2::PositionMeasurementInterfaceBase Class Reference
Base class for position measurement interface. More...
#include <px4_ros2/navigation/experimental/navigation_interface_base.hpp>
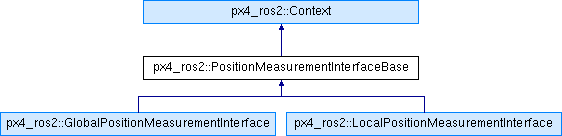
Inheritance diagram for px4_ros2::PositionMeasurementInterfaceBase:
Public Member Functions | |
| PositionMeasurementInterfaceBase (rclcpp::Node &node, std::string topic_namespace_prefix="") | |
| bool | doRegister () |
 Public Member Functions inherited from px4_ros2::Context Public Member Functions inherited from px4_ros2::Context | |
| Context (rclcpp::Node &node, std::string topic_namespace_prefix="") | |
| rclcpp::Node & | node () |
| const std::string & | topicNamespacePrefix () const |
| virtual void | addSetpointType (SetpointBase *setpoint) |
| virtual void | setRequirement (const RequirementFlags &requirement_flags) |
Protected Attributes | |
| rclcpp::Node & | _node |
Detailed Description
Base class for position measurement interface.
Member Function Documentation
◆ doRegister()
|
inline |
Register the interface.
- Returns
- true on success
The documentation for this class was generated from the following file:
- px4_ros2_cpp/include/px4_ros2/navigation/experimental/navigation_interface_base.hpp